EA-2 Scamander
自動配粉機
「EA-2」代表「Experimental Apparatus No.2」,而這個計畫的暱稱「Scamander」取自 J. K. Rowling 的著名小說《怪獸與牠們的產地》。在這部作品中,角色 Newt Scamander 是這本教科書的作者。我將本裝置命名為「Scamander」,代表「奇幻的化學配方,以及它們的誕生地」。
此自動配粉機能在 14 小時內製備 96 種不同配方,效率是人工的 6 倍。此機台可選擇 40 種不同粉體進行混合。我使用 AutoCAD 設計元件,並使用 Ender-3S 3D 印表機列印,電子元件則手工焊接在電路板上以控制步進馬達。12 顆步進馬達控制粉體盒與空瓶的 XY 位移。粉體盒的控制訊號由多個串接的移位暫存器實作。混合重量透過 Shimadzu ATY-124 電子天平測量。控制程式整合 LabVIEW、Arduino 與 VBA,可根據使用者的設計配方自動秤量粉體並記錄誤差。
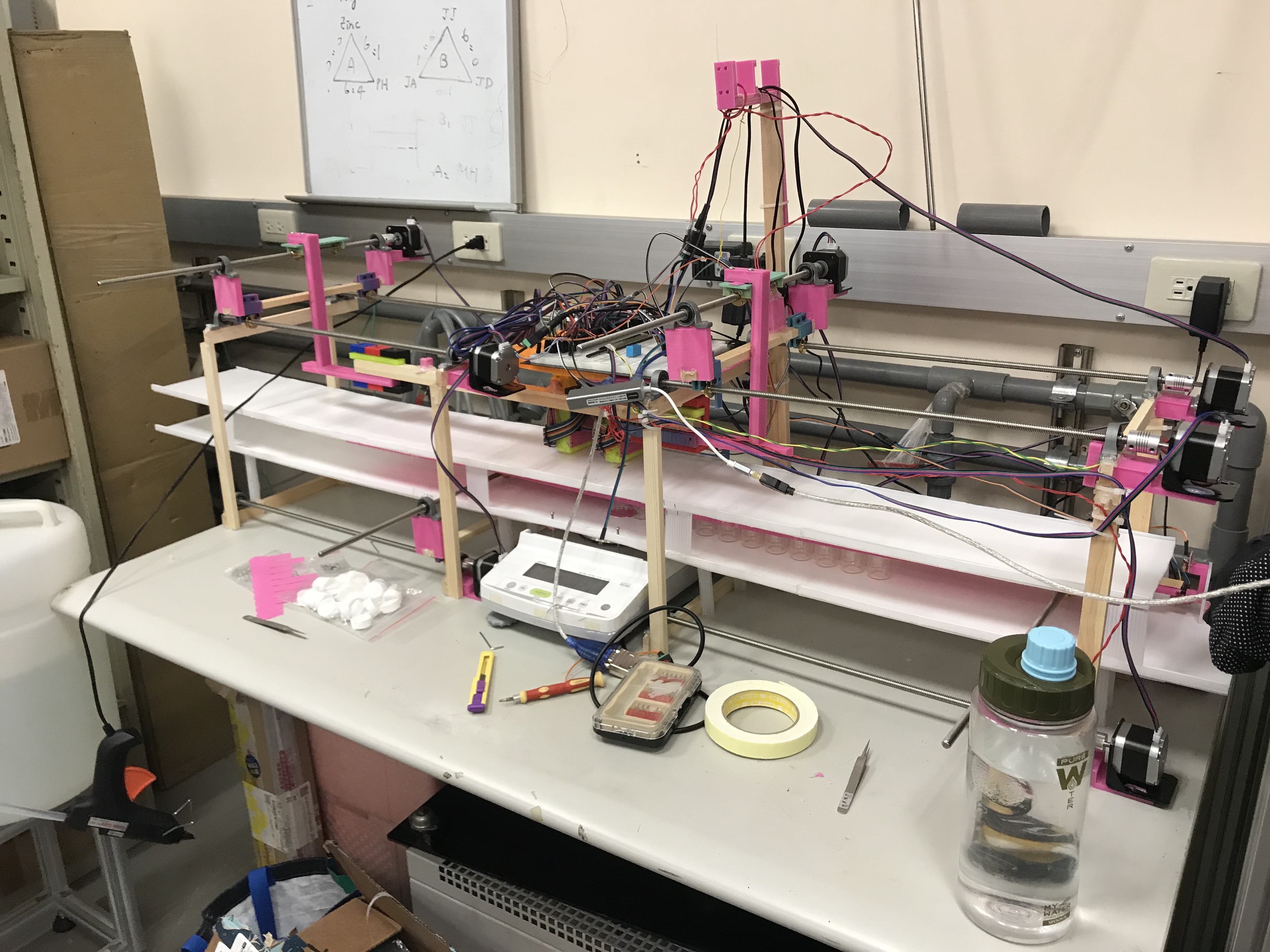
▲EA-2 Scamander 全景圖。(點圖可放大)
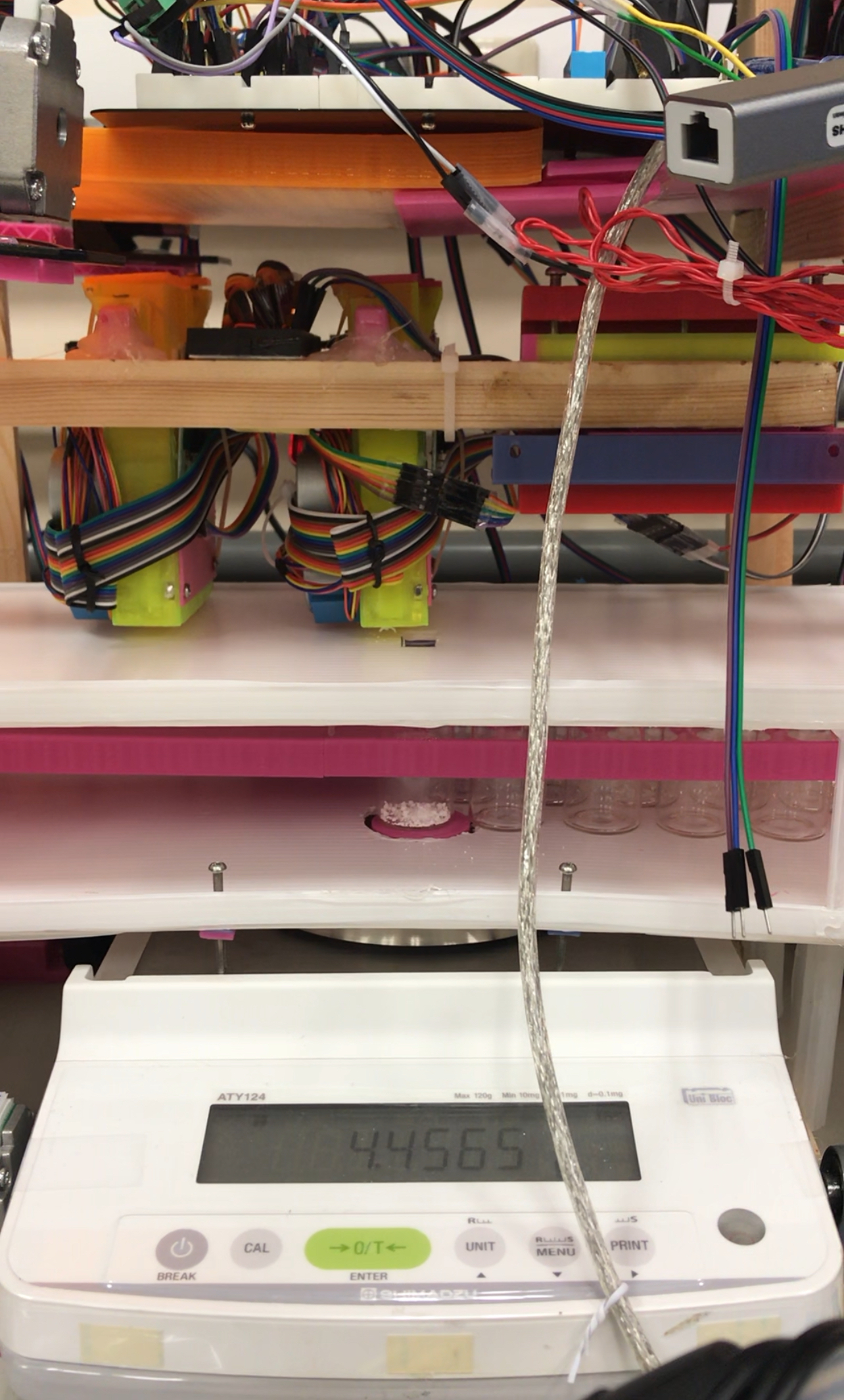
▲粉體秤重畫面。
▲系統初始化。控制流程整合 LabVIEW、Arduino 與 VBA。從 LabVIEW 啟動,呼叫 VBA(Excel)讀取使用者的化學配方表,產生對應控制碼後,控制 Arduino 啟動步進馬達以執行配料。天平讀值則透過 RS-232 傳輸。

▲EA-2 的 LabVIEW 控制流程圖。(點圖可放大)
EA-2 的測試與製作過程

▲粉體盒與其上的控制板。
▲粉體盒測試畫面。
▲機構初始化測試畫面。
 王培儒
王培儒